
Active robots unlock animal navigation mysteries
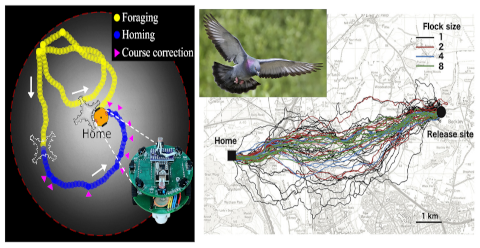
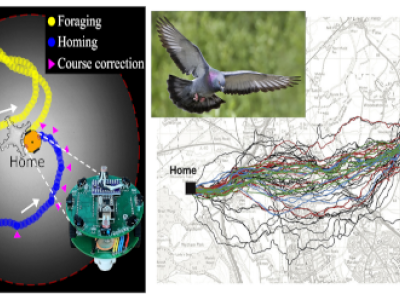
Homing, the incredible ability of animals to find their way back to their homes from distant, unfamiliar places, has puzzled scientists for centuries. In this work, we show that this process is inherently efficient and uncover key universal features in homing trajectories. We use a programmable self-propelled robot executing life-like dynamics to model it as an actual living organism. We program robots with variable noise strength, quantifying their deviation from straight-line trajectories. Furthermore, the robot utilizes onboard sensors to sense light gradients, enabling it to perform homing motion towards a specific point. We find that in the case of the robot consistently correcting its course by reorienting towards home every time it pointed opposite to it, the homing time became independent of the noise beyond a critical value of noise strength, signifying an enhanced efficiency. We reproduced this phenomenon in computer simulations and developed an analytical model with key theoretical predictions. We later tested our model on trajectory data of flying pigeon flocks and found an excellent agreement with our theory. Our work provides valuable insights into the physics of homing dynamics, providing a statistical basis for its robustness across the animal kingdom.
{kind=link}
{kind=link}
{kind=link}
{kind=link}